Featured Proof
XR x Robotics
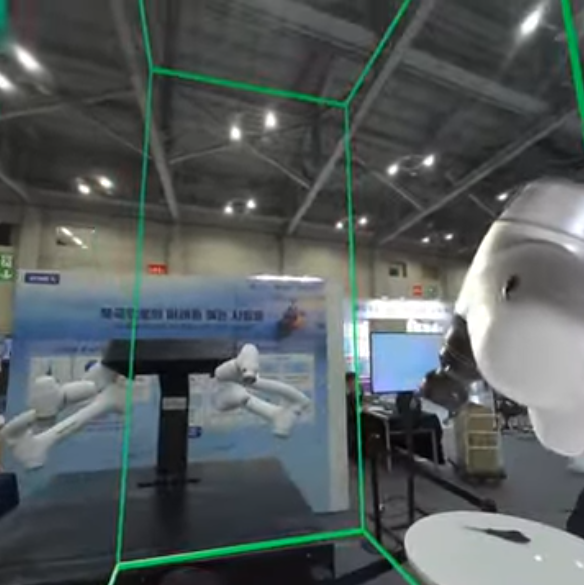
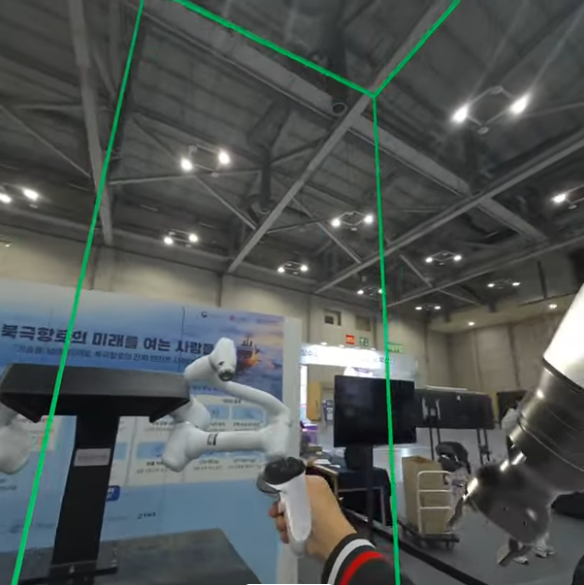
VR Robot Teleoperation
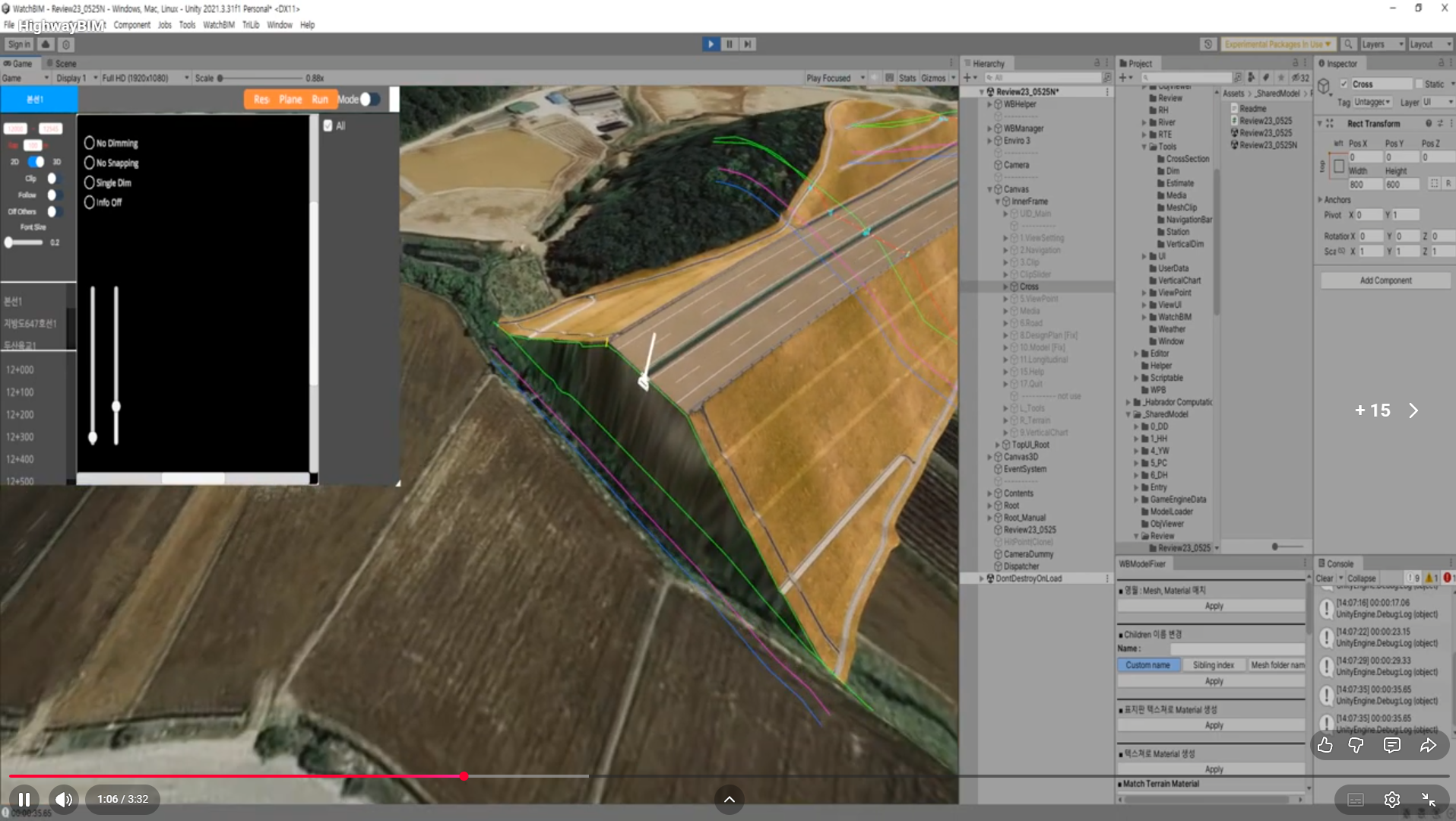
Quest 3 input, Unity runtime, Flask bridge, RoboDK, safety logic, and an in-house Jacobian IK extension tied into one working industrial XR pipeline.
Open Case Study north_east